CP
- class ipkiss3.all.CP
Description of where a route should pass through.
- Parameters:
- xy: Sequence, Symbol
XY-coordinate through which the route should go. X or Y can be None to describe a line.
- direction: DIRECTION, Optional
Direction at which the route goes through the control point.
- relative_to: str or Symbol, or tuple of str or float, Optional
Reference to an instance, port, symbol or a coordinate, relative to which this control point is defined. This cannot be combined with a symbolic xy. Can also be a tuple, then the first element is used for relative x position and the second for relative y position. See Symbols for more information.
Examples
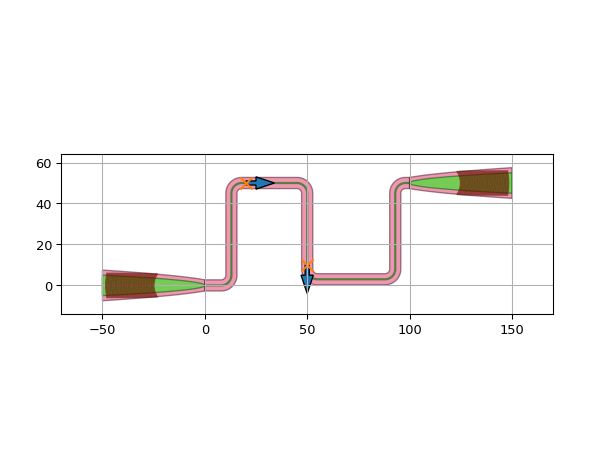
import si_fab.all as pdk import ipkiss3.all as i3 import matplotlib.pyplot as plt fc = pdk.FC_TE_1550() control_points = [i3.CP((20, 50), i3.EAST), i3.CP((50, 10), i3.SOUTH)] circuit = i3.Circuit( insts={"fc_in": fc, "fc_out": fc}, specs=[ i3.Place("fc_in:out", position=(0, 0)), i3.Place("fc_out:out", position=(100, 50)), i3.FlipH("fc_out"), i3.ConnectManhattan( "fc_in:out", "fc_out:out", control_points=control_points, ), ], ) circuit.Layout().visualize(show=False) plt.arrow(20, 50, 5, 0, width=2.0) plt.arrow(50, 10, 0, -5, width=2.0) plt.scatter([cp[0] for cp in control_points], [cp[1] for cp in control_points], c="C1", s=80, marker="x") plt.show()
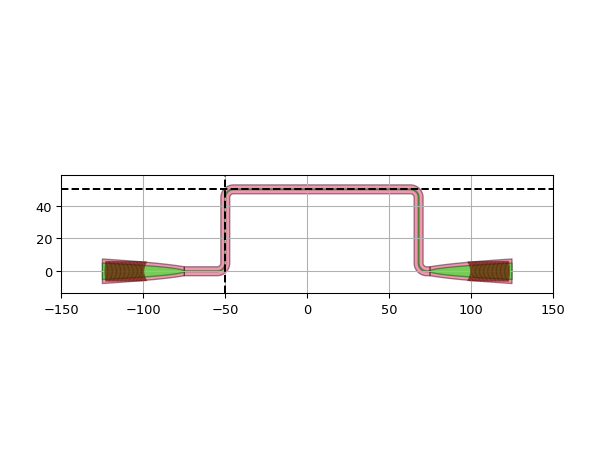
import si_fab.all as pdk import ipkiss3.all as i3 import matplotlib.pyplot as plt gc = pdk.FC_TE_1550() circuit = i3.Circuit( insts={"gc1": gc, "gc2": gc}, specs=[ i3.Place("gc1", position=(-100, 0)), i3.Place("gc2", position=(100, 0), angle=180), i3.ConnectManhattan( "gc1:out", "gc2:out", control_points=[i3.CP((-50, None)), i3.CP((None, 50))], ), ], ) lay = circuit.Layout() lay.visualize(show=False) plt.axvline(x=-50, color="k", linestyle="--") plt.axhline(y=50, color="k", linestyle="--") plt.show()
- classmethod H(y)
The H control point is a special case of CP, in the sense that H(y) == CP((None, y))
- classmethod V(x)
The V control point is a special case of CP, in the sense that V(x) == CP((x, None))